Дискретно-событийное моделирование#
Дискретно-событийное моделирование (ДСМ) - это разновидность имитационного моделирования. Рассмотрим, как устроено ДСМ с использованием Python в контексте библиотеки SimPy, функциональности которой достаточно для создания сложных многоуровневых имитационных моделей со множеством агентов.
Начнём с рассмотрения основ SimPy. Затем рассмотрим простую и показательную задачку о движении материальной точки (шарика) в ограниченном двумерном пространстве (ящике, коробке). Затем подробнее рассмотрим некоторые примеры из документации SimPy.
Основы SimPy#
Для начала импортируем библиотеку:
import simpy as sim
---------------------------------------------------------------------------
ModuleNotFoundError Traceback (most recent call last)
Cell In[1], line 1
----> 1 import simpy as sim
ModuleNotFoundError: No module named 'simpy'
Подход ДСМ основан на понятии “событие”. При наступлении события должны быть выполнены те или иные действия, которые определяются создателями модели (нами). Это так называемая модель “событие - действие”. Чтобы её прояснить рассмотрим такой пример.
Пусть в некоторой нашей имитационной модели \(n\) событий следуют друг за другом через случайный промежуток времени \(\tau\). Пусть величина \(\tau\) распределена по экспоненциальному закону с плотностью вероятности
где \(\tau_{\rm mean}\) - средняя величина времени между событиями.
Тогда в коде это выражается следующим образом:
from numpy.random import default_rng
def exp_time(env, tau_mean, n, seed=None):
"""Генерирует события через случайные
промежутки времени.
env - объект среды SimPy.
tau_mean - среднее время между событиями.
n - количество событий.
seed - затравка для генератора случайных чисел.
"""
rg = default_rng(seed)
for i in range(n):
tau = rg.exponential(tau_mean)
yield env.timeout(tau)
print(f"Событие {i+1} наступило в {env.now}")
env = sim.Environment()
events_gen = exp_time(env, tau_mean=3., n=5)
env.process(events_gen)
env.run()
Событие 1 наступило в 0.9366925032480682
Событие 2 наступило в 7.582409661592764
Событие 3 наступило в 7.757931973981688
Событие 4 наступило в 8.226352505480024
Событие 5 наступило в 10.084292174730727
Что сделано:
Для генерации случайных чисел импортировали функцию инициализации генератора по умолчанию.
Описали генераторную функцию (см. раздел Генераторы)
exp_time.Инициализировали среду SimPy
sim.Environmentи сохранили в переменнойenv. Именно в этот момент SimPy создаёт журнал событий, список процессов и т.д.Инициализировали, но не запустили (!), процесс методом
env.process, передав ему генератор событий.Запустили ДСМ методом
env.run.
В генераторной функции exp_time при её вызове:
Инициализируется генератор случайных чисел.
Поток выполнения программы входит в цикл
forпо числу событийn.Генерируется величина \(\tau\).
Оператор
yieldвозвращает генератор событий типаsim.Timeout. Поток выполнения возвращается в место вызоваexp_time, в данном случае в строкуevents_gen = ....
При вызове функции exp_time создаётся генератор событий, сохраняемый в переменной events_gen.
Далее events_gen передаётся в качестве аргумента методу env.process, регистрирующему SimPy-процесс.
С этого момента env “знает” о существовании этого процесса.
При вызове метода env.run SimPy “под капотом” запускает свой основной цикл или цикл обновления.
Последовательность этого цикла в общих чертах следующая:
Обходится список зарегистрированных генераторов событий - в нашем случае генератор всего один (результат вызова
exp_time) и зарегистрирован он при вызовеenv.process. С каждым таким генератором ассоциировано событие, время наступления которого в нашем случае известно, но в общем случае может быть и неизвестным (см. пример в Ожидание события). В нашем случае событием является истечение времени ожиданияenv.timeout.Выбирается генератор с ближайшим событием (у нас он всего один). При этом обновляется счётчик глобального времени
env.nowи выполняется ряд других действий “под капотом”. К этому генератору применяется функцияnext- это и означает наступление события.Поток управления входит в генераторную функцию (
exp_time) - выполняется код, расположенный подyield, пока не будет достигнут очередной операторyieldили функцияexp_timeне завершится. Это соответствует выполнению действий в ответ на событие.Цикл повторяется.
Никакой магии, никаких особенностей - чистый Python. Таким образом SimPy реализует концепцию ДСМ “событие - действие”. Далее рассмотрим более показательную задачу.
Шарик в коробке#
Представьте прямоугольную коробку, внутри которой от стенки к стенке движется шарик. Когда он достигает границы области, то упруго от неё отскакивает. Пусть пространство будет ограничено прямоугольником шириной \(w\) и высотой \(h\). Шарик в начальный момент времени \(t_0 = 0\) находится в случайной точке \((x_0, y_0)\) внутри прямоугольника и имеет случайную скорость \((v_x, v_y)\) постоянную по величине: \(v = \sqrt{v_x^2 + v_y^2} = \mathrm{const}\).
При абсолютно упругом ударе о вертикальные стенки отражается x-составляющая скорости \(v_x' = -v_x\), при ударе о горизонтальные - y-составляющая: \(v_y' = -v_y\).
Мы хотим промоделировать движение шарика в коробке в течение заданного времени \(T\). Как это сделать?
Одно из решений, часто первым приходящим на ум, заключается в задании некоторого постоянного малого шага по времени \(\Delta t\). Однако сразу возникает два вопроса:
Как определить, какой шаг является малым, а какой - большим?
Постоянная величина шага \(\Delta t\) приводит к проблеме пересечения границ, т.е. тело выходит за границы расчётной области и на деле ударяется не о стенку коробки, а о что-то, расположенное вне её. Это кардинально меняет траекторию тела, по сути нарушая условия задачи.
Шаг по времени в данной задаче зависит от размеров прямоугольника и скорости тела. Чем меньше область и больше скорость, тем меньше должен быть шаг \(\Delta t\). Скажем, при скорости 1 м/с и шаге по времени 0.1 с шарик выйдет за границу не более, чем на \(1 \cdot 0.5 = 0.1\) м. Если размеры прямоугольника составляют десятки и более метров, то погрешность в 0.1 м не велика. Однако тогда понадобится очень большое число промежуточных шагов, при которых никаких событий (столкновений) в системе не происходит. Компьютер тратит время впустую (и мы вместе с ним). Более того, методическая ошибка в расчёте столкновений всё же присутствует, сколь малой бы она ни была. Если за время моделирования шарик столкнётся со стенками 10 раз - мы получим одну величину ошибки \(\varepsilon_1\) в определении конечного положения тела. Если же столкновений будет 100000, то ошибка \(\varepsilon_2\) конечного положения будет много больше ошибки \(\varepsilon_1\). Следовательно, при итеративном подходе методическая ошибка расчёта накапливается. Ошибка накапливается также ввиду конечной точности представления вещественных чисел в компьютере.
Рассмотренный подход называется итеративным. Каждая итерация представляет из себя следующую последовательность действий:
\(x_{i+1} = x_i + v_{x\, i+1} \Delta t_i\).
\(y_{i+1} = y_i + v_{y\, i+1} \Delta t_i\).
\(t_{i+1} = t_i + \Delta t_i\).
Проверка пересечения границ. Если границы пересечены, то меняется знак соответствующей проекции скорости. Например, при столкновении с правой или левой стенкой \(v_{x\, i+1} = -v_{xi}\). Если столкновения нет, то проекции не изменяются: \(v_{x\, i+1} = v_{xi}\) и \(v_{y\, i+1} = v_{yi}\).
Итерации повторяются, пока \(t_i < T\).
Проверка пересечения границ заключается в проверке условий \(x \notin (x_\mathrm{lb}; x_\mathrm{rb})\) и \(y \notin (y_\mathrm{bb}; y_\mathrm{tb})\), где \(x_\mathrm{lb}\) и \(x_\mathrm{rb}\) - прямые левой и правой границ соответственно; \(y_\mathrm{bb}\) и \(y_\mathrm{tb}\) - прямые нижней и верхней границ соответственно.
Если не спешить и обдумать задачу более основательно, то можно заметить, что по известной и постоянной скорости, начальному положению тела и при известных размерах пространства несложно рассчитать промежуток времени \(\Delta t_i\), через который тело столкнётся с одной из границ. Действительно, если в момент времени \(t_i\) проекции скорости тела \(v_{xi} > 0\) и \(v_{yi} > 0\), то шарик движется в направлении вправо вверх. Остаётся определить, какая из двух границ - правая или верхняя - будет достигнута быстрее. Если координата последнего столкновения шарика в момент времени \(t_i\) есть \((x_i, y_i)\), то с правой границей он столкнётся через время \(\Delta t_{\mathrm{rb} i} = (x_\mathrm{rb} - x_i) / v_{xi}\), а с верхней - через \(\Delta t_{\mathrm{tb} i} = (y_\mathrm{tb} - y_i) / v_{yi}\). И тогда \(t_{i+1} = t_i + \min(\Delta t_{\mathrm{rb} i}, \Delta t_{\mathrm{tb} i})\). Аналогично рассчитывается время столкновения с любой границей в зависимости от комбинации знаков проекций скорости тела.
Note
Если какая-либо из проекций равна нулю, то достаточно рассмотреть лишь одну границу, в направлении которой движется тело.
Таким образом, мы можем рассчитать момент времени \(t_{i+1}\) наступления следующего (\((i+1)\)-го) события “столкновение со стенкой”. Зная \(\Delta t_i\) и закон движения тела, мы можем точно рассчитать точку столкновения с границей: \(x_{i+1} = x_i + v_{xi} \Delta t_i\) и \(y_{i+1} = y_i + v_{yi}\Delta t_i\), после чего изменить знак соответствующей проекции скорости: либо \(v_{x\, i+1} = -v_{xi}\), либо \(v_{y\, i+1} = -v_{yi}\). После этого рассчитывается время до следующего столкновения и т.д.
При этом нам не нужно:
думать о выборе шага по времени - в реальных задачах от времени может зависеть большое число параметров, вследствие чего крайне затруднительно выбрать постоянный шаг по времени;
впустую тратить расчётное время компьютера - он обсчитает лишь моменты, в которых меняется состояние системы (в данном случае, когда при столкновении меняется знак у одной из проекций скорости);
знать сколько раз за время моделирования \(T\) шарик столкнётся со стенками.
При применении ДСМ методическая расчётная ошибка равна нулю и не накапливается. Получается траектория движения шарика, точно совпадающая с теоретической.
Important
Состояние системы изменяется при наступлении какого-либо события. Между событиями состояние остаётся постоянным. Это одно из основных положений ДСМ.
Для сравнения результатов реализуем и итеративный, и дискретно-событийный подходы.
Итеративный подход#
Напишем функцию итеративного решения задачи о шарике в коробке.
Назовём её iterative_solver.
Чтобы было легче воспринимать код, распределим его на функции.
import numpy as np
def iterative_solver(bounds, xy, v_xy, t_until, t_step):
"""Итеративный решатель задачи о шарике в коробке.
* `bounds` - кортеж из 4 чисел, описывающих соответственно
левую, правую, нижнюю и верхнюю границы прямоугольной области.
* `xy` - начальная координата шара `(x, y)`.
* `v_xy` - кортеж `(v_x, v_y)` со значениями проекций вектора
начальной скорости точки.
* `t_until` - время моделирования.
* `t_step` - постоянный шаг по времени.
"""
# Распакуем аргументы-кортежи в соответствующие переменные
x, y = xy
v_x, v_y = v_xy
# Инициализируем "часы"
t = 0
# и массив траекторных точек
# (именно эти три переменные формируют траекторию)
traj = [(t, x, y)]
# Выполняем итерации:
while t <= t_until:
# 1. Обновляем координаты и время
x += v_x * t_step
y += v_y * t_step
t += t_step
# 2. Проверяем условие столкновения
flag, (sv_x, sv_y) = collision(bounds, (x, y))
# 3. Инвертируем проекции скорости
# (если было столкновение)
if flag:
# Чтобы не расходавать память
# на точки между столкновениями,
# будем запоминать только точки столкновений
traj.append((t, x, y))
# Инвертируем проекции скорости
v_x *= sv_x
v_y *= sv_y
# В завершение добавим последнюю точку траектории
traj.append((t, x, y))
# Возвращаем полученную траектории как массив NumPy
return np.array(traj)
def collision(bounds, xy):
"""Условие столкновения шара с границами коробки.
* `bounds` - кортеж четырёх элементов,
хранящий координаты левой, правой, нижней и верхней границ
прямоугольной области.
* `xy` - текущая координата `(x, y)` шара.
Возвращает кортеж из двух единичных значений, определяющих,
нужно ли инвертировать соответствующую проекцию скорости.
"""
x_lb, x_rb, y_bb, y_tb = bounds
x, y = xy
# Знак элемента signs показывает, нужно ли инвертировать
# соответствующую проекцию скорости
signs = [1, 1]
# Флаг, показывающий было ли столкновение
flag = False
if not x_lb < x < x_rb:
# Столкновение с одной из вертикальных стен,
# значит, нужно инвертировать v_x
signs[0] = -1
flag = True
if not y_bb < y < y_tb:
# Столкновение с одной из горизонтальных стен,
# значит, нужно инвертировать v_y
signs[1] = -1
flag = True
return flag, signs
Функция collision проверяет условия столкновения, которые, напомним, имеют следующий вид:
Warning
Функция collision имеет один эффект, влияющий на траекторию шара, который мы не предусмотрели.
Получится ли у вас его определить?
Опишем удобную для многоразового использования функцию визуализации траектории plot_traj:
import matplotlib.pyplot as plt
def plot_traj(traj, figax=None, **kw):
"""Строит траекторию тела.
* `traj` - прямоугольная матрица, каждая строка
которой соответствует точке траектории. Точка траектории
описывается тремя величинами: временем столкновения
и x- и y-координатой точки в этот момент.
* `figax` - кортеж двух элементов: рисунка и оси графика.
"""
if figax is None:
fig, ax = plt.subplots()
else:
fig, ax = figax
# Линии траектории
ax.plot(traj[:, 1], traj[:, 2], **kw)
# Начальная и конечная точки
ax.plot(traj[0, 1], traj[0, 2],
ls="", marker="o", c="purple")
ax.plot(traj[-1, 1], traj[-1, 2],
ls="", marker="x", c="purple")
return fig, ax
Посмотрим, что получилось. Пусть условия задачи таковы (единицы измерения нас не интересуют):
\(x_\mathrm{lb} = 0\), \(x_\mathrm{rb} = 1\), \(y_\mathrm{bb} = 0\) и \(y_\mathrm{tb} = 1\);
\(x_0 = 2/3\) и \(y_0 = 1/3\);
\(v_{x0} = 0.3\) и \(v_{y0} = 0.1\);
шаг по времени \(\Delta t = 0.5\);
время моделирования \(T = 60\).
# Условия задачи
bounds = 0, 1, 0, 1
xy = 0.67, 0.33
v = 0.3, 0.1
dt = 0.5
t_until = 60
Моделируем и строим траекторию:
traj = iterative_solver(bounds, xy, v, t_until, dt)
_, ax = plot_traj(traj)
ax.axvline(bounds[0], color="k")
ax.axvline(bounds[1], color="k")
ax.axhline(bounds[2], color="k")
ax.axhline(bounds[3], color="k")
ax.set(xlabel="$x$, м", ylabel="$y$, м", aspect="equal");
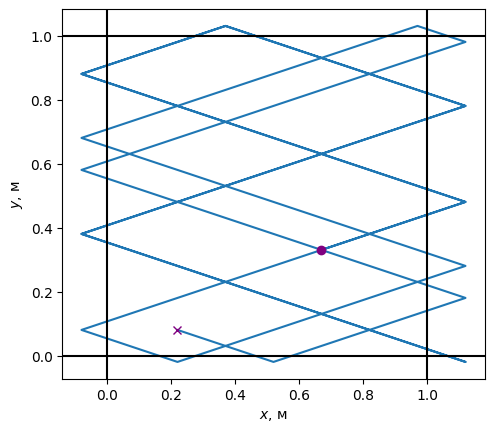
Число столкновений:
print("Число столкновений:", traj.shape[0] - 1)
# Не учитывая последнюю (свободную) точку
Число столкновений: 21
Note
Кстати, о непредусмотренном эффекте функции collision.
Этот эффект виден на получившемся графике.
Постарайтесь его найти и объяснить.
Если уменьшить шаг по времени в 5 раз, то получим следующую картину:
traj_iterative = iterative_solver(
bounds, xy, v, t_until, t_step=dt/5
)
_, ax = plot_traj(traj_iterative)
ax.axvline(bounds[0], color="k")
ax.axvline(bounds[1], color="k")
ax.axhline(bounds[2], color="k")
ax.axhline(bounds[3], color="k")
ax.set(xlabel="$x$", ylabel="$y$", aspect="equal");
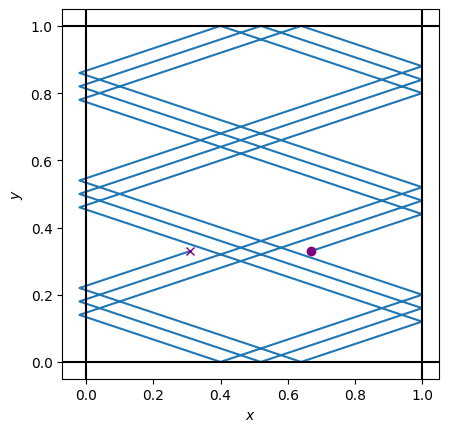
print("Число столкновений:", traj_iterative.shape[0] - 1)
Число столкновений: 25
Сравнив два рисунка, можно заметить, что хоть уменьшение шага и привело к более точной траектории тела, но пересечение границ всё равно присутствует. Также при различном временном шаге получены разные значения числа столкновений: 21 и 25 соответственно.
Note
Заметьте, что столкновение с горизонтальными границами происходит почти на них. На самом деле при данном масштабе не видно, что выход за границу по вертикальной оси составляет 0.03 м. Можно и так подобрать параметры задачи (шаг по времени, скорость и начальную координату шара), что столкновение будет происходить точно на границах. Но это будет либо совпадением, либо подгонкой параметров, которую бывает невозможно произвести в сложных задачах.
Настало время решить эту задачу правильно.
Дискретно-событийный подход#
Как отмечено выше, при дискретно-событийном подходе мы должны рассчитать момент наступления события.
def de_solver(bounds, xy, v_xy, t_until):
"""Решатель, рализующий подход ДСМ.
* `bounds` - кортеж из 4 чисел, описывающих соответственно
левую, правую, нижнюю и верхнюю границы прямоугольной области.
* `xy` - начальная координата шара `(x, y)`.
* `v_xy` - кортеж `(v_x, v_y)` со значениями проекций вектора
начальной скорости точки.
* `t_until` - время моделирования.
"""
# Для удобства расчётов сделаем NumPy-массивы
xy, v_xy = np.array(xy), np.array(v_xy)
# Инициализируем SimPy-среду.
env = sim.Environment()
# Сохраним начальную точку траектории
traj = [(env.now, *xy)]
# Регистируем процесс motion
env.process(motion(env, bounds, xy, v_xy, traj))
# Запускаем моделирование в течение заданного времени
env.run(until=t_until)
# Сохраним точку траектории в конце моделирования
xy += v_xy * (t_until - traj[-1][0])
traj.append((env.now, *xy))
# Возвращаем траекторию в виде NumPy-массива
return np.array(traj)
def motion(env, bounds, xy, v_xy, traj):
"""Генераторная функция для событий столкновения с границами.
* `env` - объект среды SimPy.
* `bounds` - кортеж из 4 чисел, описывающих соответственно
левую, правую, нижнюю и верхнюю границы прямоугольной области.
* `xy` - координата последнего столкновения тела.
* `v_xy` - скорость тела после последнего столкновения.
* `traj` - прямоугольная матрица, каждая строка
которой соответствует точке траектории. Точка траектории
описывается тремя величинами: временем столкновения
и x- и y-координатой точки в этот момент.
"""
while True:
dt, signs = calc_delay(bounds, v_xy, xy)
yield env.timeout(dt)
xy += v_xy * dt
traj.append((env.now, *xy))
v_xy *= signs
def calc_delay(bounds, v_xy, xy):
"""Рассчитать величину времени, через которое наступит
следующее событие, по заданным границам `bounds`,
скорости шара `v_xy` и координате его последнего
столкновения `xy`."""
# Распакуем аргументы для удобства
x_lb, x_rb, y_bb, y_tb = bounds
x, y = xy
vx, vy = v_xy
# Вычисляем время (задержку):
dtx, dty = 0., 0.
# - в направлении оси Ox
if vx > 0:
dtx = (x_rb - x) / vx
elif vx < 0:
dtx = (x_lb - x) / vx
# - в направление оси Oy
if vy > 0:
dty = (y_tb - y) / vy
elif vy < 0:
dty = (y_bb - y) / vy
# Определяем, какую проекцию скорости инвертировать
signs = [1, 1]
signs[np.argmin((dtx, dty))] = -1
return min(dtx, dty), signs
Сформированная программа с точки зрения ДСМ ничем не отличается от программы в примере из раздела Основы SimPy.
Разница лишь в том, что в данном случае время между событиями мы рассчитываем (в функции calc_delay), а не генерируем как случайное число.
Промоделируем при тех же условиях:
# Заметьте, мы уже не задаём шаг по времени
traj_des = de_solver(bounds, xy, v, t_until)
_, ax = plot_traj(traj_des)
ax.axvline(bounds[0], color="k")
ax.axvline(bounds[1], color="k")
ax.axhline(bounds[2], color="k")
ax.axhline(bounds[3], color="k")
ax.set(xlabel="$x$", ylabel="$y$", aspect="equal");
print("Число столкновений:", traj_des.shape[0] - 1)
Число столкновений: 25
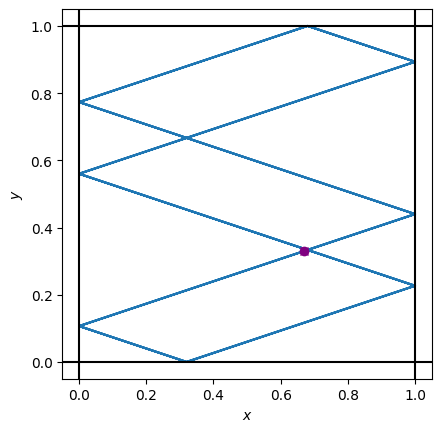
Получили точное решение, которое заметно отличается от всех решений, полученных ранее - шарик оказался в том же самом месте, из которого начал своё движение.
Итак, приведём полученные результаты на одном графике:
fig, ax = plot_traj(traj_iterative, label="Итеративный метод")
plot_traj(traj_des, (fig, ax), label="ДСМ")
ax.legend(loc="upper right")
ax.axvline(bounds[0], color="k")
ax.axvline(bounds[1], color="k")
ax.axhline(bounds[2], color="k")
ax.axhline(bounds[3], color="k")
ax.set(xlabel="$x$", ylabel="$y$", aspect="equal");
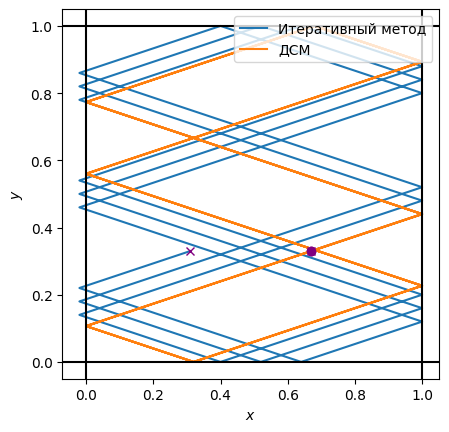
Из полученного графика также отчётливо видно, как по мере увеличения числа событий, увеличивается ошибка итеративного метода. С течением времени полученная с его помощью траектория всё сильнее и сильнее отклоняется от теоретической (оранжевой). В данном случае относительная ошибка в определении конечного положения составляет примерно 40% (!).
Изменим начальные условия и посмотрим на результат:
# Немного другие условия задачи
bounds = 0, 2, 0, 1
xy = 0.6, 0.2
v = 0.3, -0.1
t_until = 40 # ...равно периоду движения
traj = de_solver(bounds, xy, v, t_until)
# Показываем
_, ax = plot_traj(traj)
ax.axvline(bounds[0], color="k")
ax.axvline(bounds[1], color="k")
ax.axhline(bounds[2], color="k")
ax.axhline(bounds[3], color="k")
ax.set(xlabel="$x$", ylabel="$y$", aspect="equal");
print("Число столкновений:", traj.shape[0] - 1)
Число столкновений: 11
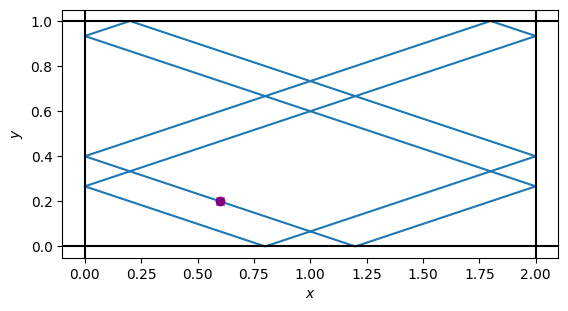
Note
Интересно подумать, почему получается периодическое движение и как рассчитать его период?
Для дальнейшего изучения SimPy достаточно отличной официальной документации с примерами
Примеры использования SimPy#
В данном разделе рассмотрены некоторые примеры из официальной документации SimPy с целью чуть лучше раскрыть принципы работы с данной библиотекой.
Прежде необходимо подключить SimPy:
import simpy as sim
Разочарование клиента в банке#
Данный пример раскрывает такие возможности SimPy, как ресурсы и условные события.
Задача следующая. Есть банк, в который приходят клиенты. У банка есть несколько окон для обслуживания клиентов. Поток клиентов случаен. Каждый клиент имеет определённое терпение, которое может закончиться, и клиент в результате просто уйдёт из банка. Если же его очередь подойдёт быстрее, чем закончится терпение, то он подойдёт к окну и займёт его на некоторое время. Остальные клиенты всё так же продолжат ждать своей очереди, насколько хватит терпения.
Нам точно понадобится рандом:
import random as rand
Также задаём основные параметры модели:
RANDOM_SEED = 42
NEW_CUSTOMERS = 5 # Общее число посетителей
INTERVAL_CUSTOMERS = 10.0 # Среднее время появления нового посетителя
MIN_PATIENCE = 1 # Минимальное
MAX_PATIENCE = 3 # и максимальное время ожидания клиента
Определим клиента как функцию-процесс (в терминах SimPy) customer.
По сути своей, это обычная генераторная функция.
def customer(env, name, counter, time_in_bank):
"""Посетитель приходит, обслуживается и уходит."""
arrive = env.now
print(f"{arrive:7.4f} {name}: Я пришёл!")
# Клиент "запрашивает" обслуживание, т.е. ресурс в терминах SimPy.
# counter - это сотрудник банка (окно обслуживания).
with counter.request() as req:
# Каково же терпение!
patience = rand.uniform(MIN_PATIENCE, MAX_PATIENCE)
# Ожидание своей очереди, пока хватает терпения.
# Это и есть условное событие: либо пришла очередь,
# либо кончилось терпение. Оператор ИЛИ в yield-выражении
# обозначается вертикальной чертой "|", как побитовое ИЛИ.
results = yield req | env.timeout(patience)
# Отмечаем, сколько клиент прождал
wait = env.now - arrive
# В results у нас список НАСТУПИВШИХ событий.
# В данном случае могло наступить всего одно событие:
# либо req, либо истекло время ожидания (timeout).
if req in results:
# Освободился ресурс (окно) - настала очередь клиента
print(f"{env.now:7.4f} {name}: Прождал {wait:6.3f}")
# Теперь клиент на случайное время занимает окно.
# Всё это время ресурс req занят и не доступен
# другим посетителям.
tib = rand.expovariate(1.0 / time_in_bank)
yield env.timeout(tib)
print(f"{env.now:7.4f} {name}: Довольный ухожу")
else:
# Кончилось терпение!
print(f"{env.now:7.4f} {name}: УХОЖУ после ожидания {wait:6.3f}!")
Теперь опишем генераторную функцию, ответственную за возникновение новых посетителей.
Назовём её source.
Она будет процессом в терминах SimPy.
def source(env, number, interval, counter):
"""Случайным образом генерирует посетителей."""
for i in range(number):
c = customer(
env,
f"Посетитель с талончиком {i+1}",
counter,
time_in_bank=12.0
)
env.process(c)
# Через сколько этот клиент нагрянет в банк?
t = rand.expovariate(1.0 / interval)
# Генерируем событие "Новый посетитель"
yield env.timeout(t)
Теперь можно и моделировать:
# Настраиваем и запускаем симуляцию
print("Банковская идилия")
rand.seed(RANDOM_SEED)
env = sim.Environment()
# Запускаем процессы и прогонку (run) модели.
# - Окно обслуживания у нас всего одно и оно является ресурсом
# в терминах SimPy.
counter = sim.Resource(env, capacity=1)
# - Инициализируем процесс появления клиентов, который, в свою очередь,
# генерирует посетителя, запускает его как процесс, а потом ждёт,
# прежде чем сгенерировать нового клиента.
env.process(source(env, NEW_CUSTOMERS, INTERVAL_CUSTOMERS, counter))
# - Так как всего будет NEW_CUSTOMERS посетителей, то симуляция
# сама собой завершится, когда уйдёт последний клиент.
# Поэтому нет нужды указывать run время моделирования until.
env.run()
Банковская идилия
0.0000 Посетитель с талончиком 1: Я пришёл!
0.0000 Посетитель с талончиком 1: Прождал 0.000
3.8595 Посетитель с талончиком 1: Довольный ухожу
10.2006 Посетитель с талончиком 2: Я пришёл!
10.2006 Посетитель с талончиком 2: Прождал 0.000
12.7265 Посетитель с талончиком 3: Я пришёл!
13.9003 Посетитель с талончиком 3: УХОЖУ после ожидания 1.174!
23.7507 Посетитель с талончиком 2: Довольный ухожу
34.9993 Посетитель с талончиком 4: Я пришёл!
34.9993 Посетитель с талончиком 4: Прождал 0.000
37.9599 Посетитель с талончиком 4: Довольный ухожу
40.4798 Посетитель с талончиком 5: Я пришёл!
40.4798 Посетитель с талончиком 5: Прождал 0.000
43.1401 Посетитель с талончиком 5: Довольный ухожу
Вот и результат. Не повезло лишь третьему талончику… Ну и банку тоже! Вдруг именно этим клиентом был Илон Маск?
Note
Кстати, сравните полученный результат с результатом официального примера.
Абсолютно точное совпадение!
Всё из-за того, что использовалась одна и та же затравка SEED для генератора псевдослучайных чисел.
Ну и сам генератор был тем же самым - из стандартной библиотеки random.
Как видите, довольно просто и быстро можно смоделировать вполне реальную задачу из теории массового обслуживания. Ведь никто не мешает учесть здесь финансовую сторону вопроса и прийти к оптимизационной задачи по типу: “Сколько нужно обслуживающих окон, чтобы минимизировать потерю клиентов, т.е. максимизировать прибыль? Сколько нужно окон утром во вторник и вечером пятницы? Как при этом минимизировать затраты на новых сотрудников, но не ухудшить обслуживание? Поставить автоматы самообслуживания? Сколько их нужно? Когда и сколько денег в них загружать?” Ну вы поняли…
Important
Создаётся впечатление, будто процессы source и customer выполняются параллельно.
На самом деле это не совсем так.
С точки зрения операционной системы поток выполнения нашей программы один, т.е. программа не “выполняется на нескольких ядрах”. Выражаясь технически, параллелизма на аппаратном уровне здесь нет. Но есть параллелизм на уровне программы.
У нас может быть любое количество запущенных процессов, но каждый процесс - это генератор.
Ожидание события#
…